Three at 120 — The Triangular Arrangement
What if you didn't need counter-rotation at all?
The Problem with Pairs
The previous simulation used two counter-rotating assemblies. Counter-rotation cancels angular momentum — without it, the whole frame spins. It works, but it constrains the geometry. Two assemblies, two motors, two timing chains, everything mirrored.
I kept thinking about it. Counter-rotation is the brute force answer to angular momentum. Two equal and opposite rotations that cancel by construction. But angular momentum is a vector. Vectors cancel in more interesting ways than just equal-and-opposite.
Three vectors at 120 degrees sum to zero. That's basic geometry. What if three co-rotating assemblies at 120-degree spacing could cancel angular momentum through symmetry alone?
The Build
Forked the simulation. Three identical pulsed gyro assemblies arranged in a triangle, each separated by 120 degrees around a central axis. All three spin in the same direction. Each assembly has its spin axis tilted inward — converging toward the centre of the arrangement.
The geometry is clean. No counter-rotation. No mirrored pairs. Three identical units bolted at equal angles.
The simulation runs per-ball 3D force and torque calculations — full r x F cross products, not simplified 2D projections. Each assembly contributes independently. The frame accumulates everything.
The Result
The 120-degree symmetry does exactly what the maths says it should.
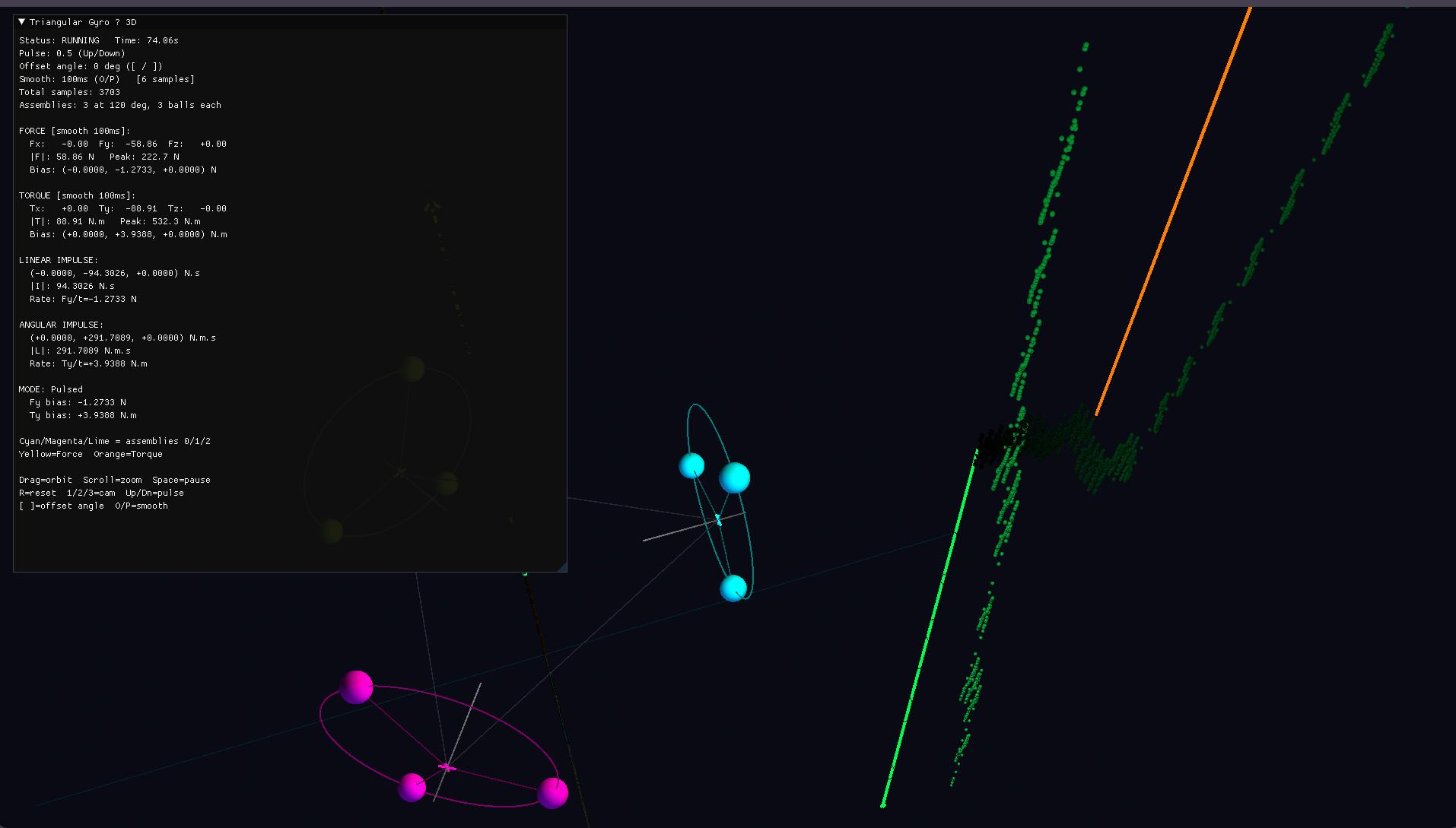
Pulsed spin (offset angle 0, vertical):
| Axis | Force | Torque | |------|-------|--------| | Fx | 0.00 N | 0.00 N.m | | Fy | -1.27 N | — | | Fz | 0.00 N | 0.00 N.m | | Ty | — | +3.94 N.m |
Fx and Fz are dead zero. Not approximately zero — zero. The 120-degree symmetry cancels every off-axis component exactly. All force concentrates onto the Y axis. The drive torque Ty about the arrangement axis is +3.94 N.m.
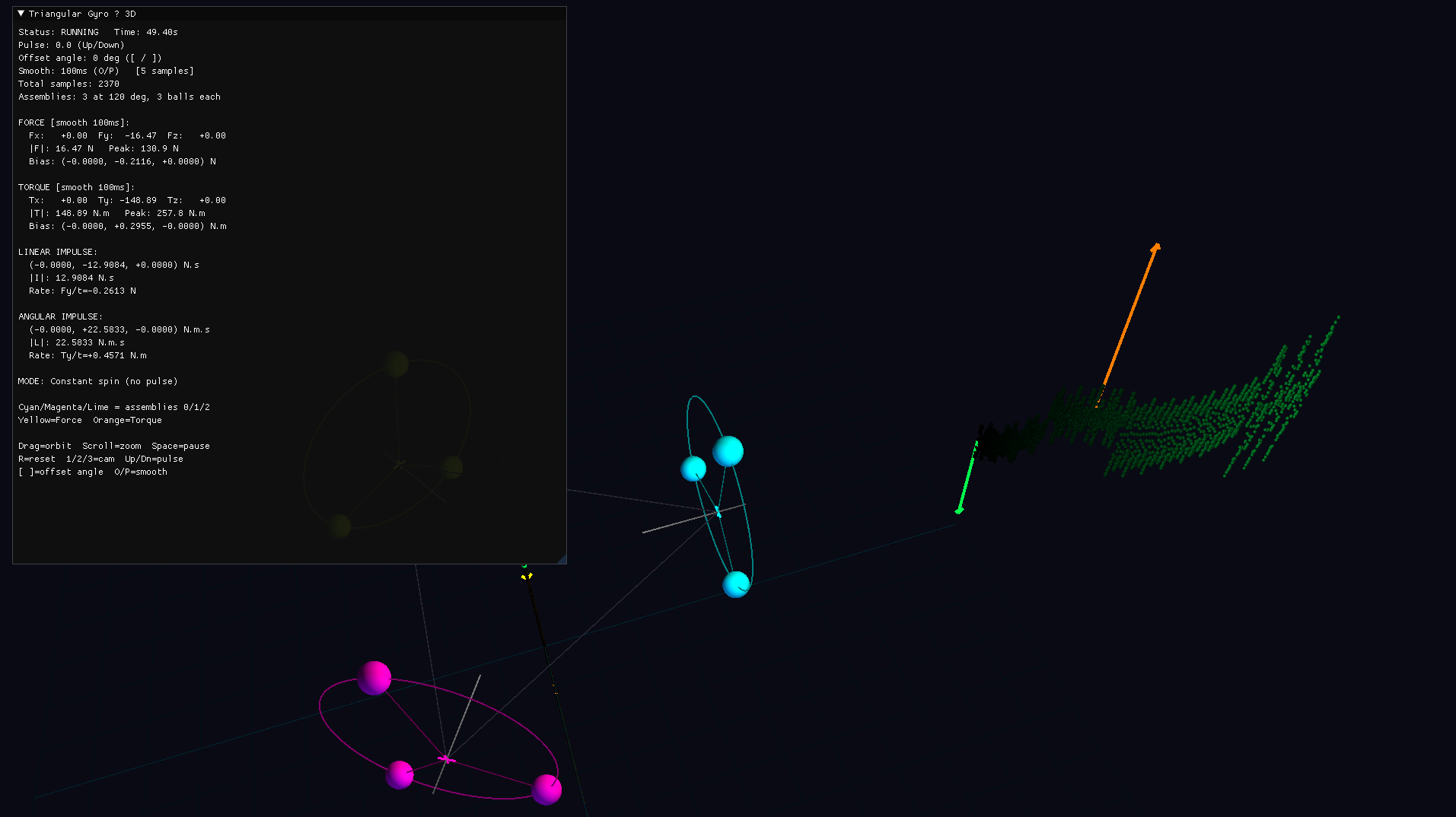
Constant spin (control):
| Axis | Force | Torque | |------|-------|--------| | Fx | 0.00 N | 0.00 N.m | | Fy | -0.21 N | — | | Fz | 0.00 N | 0.00 N.m | | Ty | — | +0.30 N.m |
The control confirms it. Constant spin produces near-zero bias. Pulsed spin produces six times the force on the same axis.
The Offset Angle
The simulation has adjustable offset angle — the tilt of each assembly's spin axis relative to the arrangement plane. Changing this rotates the direction of the net force within the rotation plane.
At offset angle 0 (vertical), all force is on Y. Sweep the offset angle and the force vector rotates. The magnitude stays roughly constant, but the direction tracks the offset. You can steer it.
The green traces in the visualisation show the accumulated force history. They bend. The force is real and directional, not random noise.
Why This Matters
The triangular arrangement solves two problems at once.
No counter-rotation. Three co-rotating assemblies cancel angular momentum through geometric symmetry. This simplifies everything — one direction of rotation, identical units, no timing synchronisation between opposing pairs.
Clean single-axis output. The 120-degree spacing kills every off-axis force component. You get pure thrust on one axis with zero lateral force. For a propulsion mechanism that needs to couple to a medium, single-axis output is exactly what you want.
The force-to-torque ratio also favours the triangular arrangement. The drive torque Ty is the reaction that would spin the frame if unconstrained — but the three-way symmetry means it distributes evenly, and the frame can be mounted to resist it simply.
What This Doesn't Change
This is still not reactionless propulsion. The Provatidis 2025 proof applies. Internal forces cannot accelerate the centre of mass in vacuum. The triangular arrangement produces a real force on the frame, but it needs coupling to a medium — friction, fluid drag, electromagnetic interaction — to convert that force into locomotion.
The geometry is better. The physics hasn't changed.
What I Learned
-
120-degree symmetry cancels angular momentum as cleanly as counter-rotation. Three identical co-rotating assemblies at equal spacing produce zero net angular momentum. No mirroring needed. This is a simpler mechanical design with fewer constraints.
-
The off-axis cancellation is exact, not approximate. Fx and Fz are mathematically zero at 120-degree spacing. The symmetry isn't just good enough — it's perfect. Any deviation from zero in the simulation would indicate a bug.
-
The offset angle parameter gives directional control. Tilting the assembly axes relative to the arrangement plane rotates the force vector. Combined with pulse strength controlling magnitude, you have two-axis thrust vectoring from a single geometry.
-
Fewer moving parts, same physics. Three identical units versus two mirrored pairs. One rotation direction versus two. Identical control signals versus synchronised opposites. The triangular version is mechanically simpler and produces cleaner output.
What's Next
Physical prototype. The simulation has gone as far as it usefully can — the force bias is confirmed, the geometry is characterised, the control parameters are mapped. The next question is whether a real device, on a real surface, produces measurable net displacement.
That means tuning the 3D printer, designing a race in Fusion 360, and building three identical assemblies on a triangular mount. The medium coupling experiment that the prior art review called for.
The sim says it should work. Time to find out.
Three at 120. No counter-rotation. One axis. Built with Claude Code. Published at indigo-nx.com.