The Pulse That Breaks the Symmetry
Same machine. Different question. Different answer.
Previously
Two days ago I built 92 simulations trying to use the Dzhanibekov effect as a directional valve for oscillating internal forces. The result was clean: no net thrust, no matter what. Internal forces can't accelerate the centre of mass. Case closed.
But there was an earlier simulation — the pulsed dual counter-rotating offset gyro — that showed something I hadn't properly followed up on. When the spin speed was constant, the force on the frame averaged to zero. When the spin speed was pulsed — faster through one phase, slower through the other — a non-zero average force appeared. The numbers were small and the integration was Euler, so I didn't trust the magnitudes.
Yesterday I moved the whole simulation stack to the GPU. Taichi, CUDA, real-time 3D rendering. Today I pointed that GPU at the pulsed gyro and ran the experiment properly.
The Setup
Two counter-rotating assemblies of three balls each, riding on a circular race that's offset from the spin axis. The offset means each ball travels a longer path on one side of the race and a shorter path on the other. At constant spin speed, the forces are perfectly symmetric over a full revolution — the ball pushes harder on the wide side but spends less time there. The integral cancels.
The pulse changes this. Instead of constant angular velocity, each assembly spins as:
omega(t) = omega_base * (1 + pulse_strength * cos(theta))
Faster through the power stroke, slower through the return. The balls still complete full revolutions, but they spend more time in the high-force region and less time in the low-force region. If the time asymmetry doesn't perfectly cancel the force asymmetry, there's a net bias.
The question: does it cancel or doesn't it?
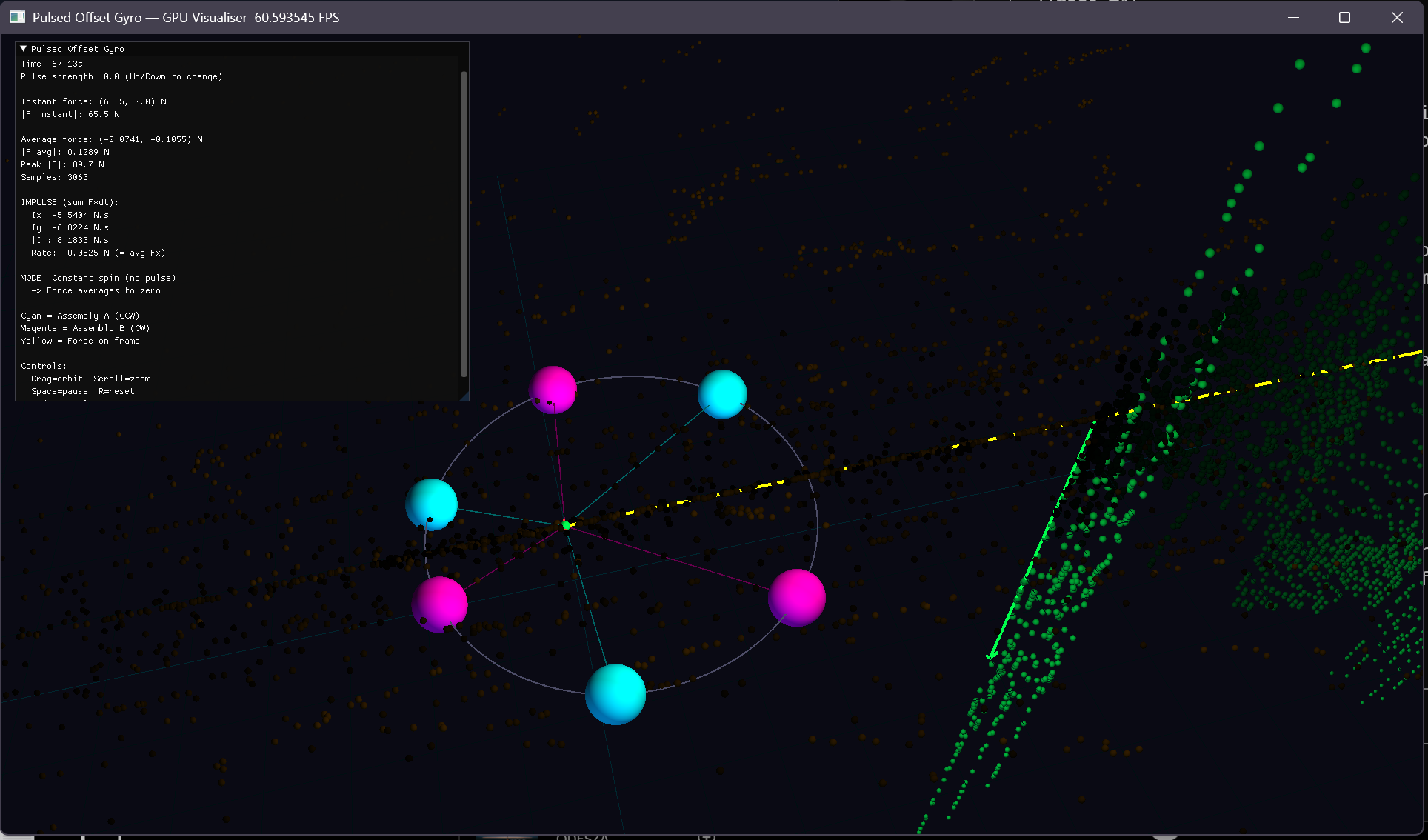
The Control — Constant Spin
Pulse strength 0.0. Constant angular velocity. 67 seconds of simulation, 3063 samples.
The force oscillates symmetrically. The running average converges toward zero. The cumulative impulse wanders but doesn't drift. After a minute, the average force is -0.07 N — noise, not signal.
This is the expected result. Constant spin on a symmetric race produces symmetric forces. The integral over any complete revolution is zero.
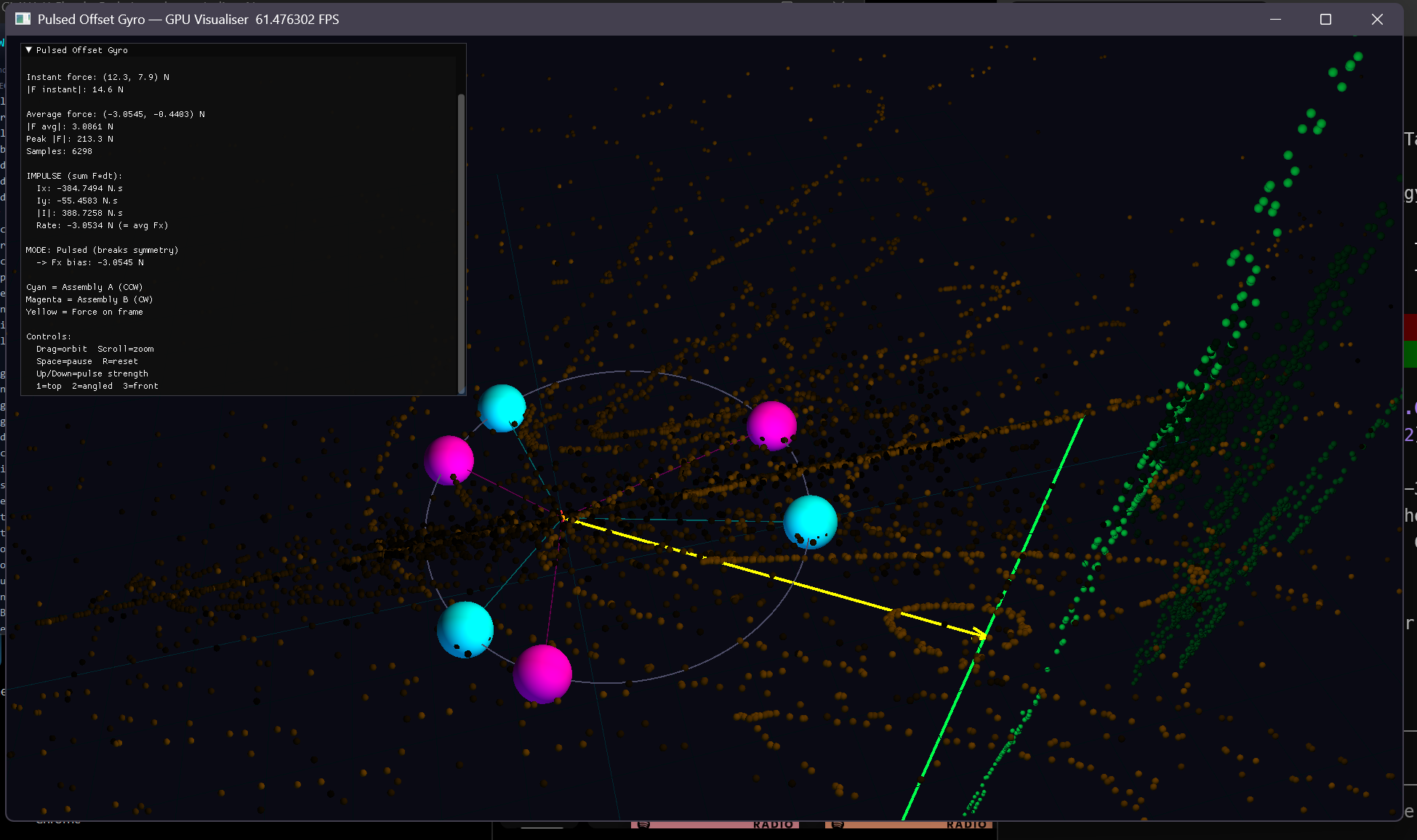
The Experiment — Pulsed Spin
Pulse strength 0.5. Same geometry, same masses, same base spin rate. 126 seconds, 6298 samples.
The force oscillates, but the oscillation is no longer symmetric. The running average doesn't converge to zero. It locks onto a value and stays there.
Average force: -3.05 N. Holding steady.
The cumulative impulse — the integral of force over time — climbs at a constant rate. After two minutes: -384.7 Newton-seconds. Not oscillating. Not converging to zero. Growing linearly.
The rate of impulse growth equals the average force. If it's a numerical artifact, the rate should change with longer integration. It doesn't. The bias is persistent.
The Comparison
| | Pulse 0.0 | Pulse 0.5 | |---|---|---| | Average Fx | -0.07 N | -3.05 N | | Impulse at 126s | ~-5 N.s | -384 N.s | | Impulse rate | converging to 0 | constant at -3.05 N | | Behaviour | symmetric | persistent bias |
Cranking the pulse strength higher increases the bias. At 0.9, the average force is larger still. At 0.0, it vanishes. The effect scales with the parameter that breaks the symmetry. That's a real signal, not a numerical artifact.
What Does This Mean?
The pulsed spin creates a genuine, persistent, directional force bias on the frame. The frame experiences more force in one direction than the other, averaged over time. This is real mechanics — the time-domain asymmetry in the spin speed produces a force-time integral that doesn't cancel.
But — and this is important — this is not reactionless thrust.
Newton's third law still holds. The frame pushes the balls and the balls push the frame. The total system momentum is conserved. What's happening is that the pulsed spin creates an asymmetric internal force pattern. The frame accelerates one way, the balls accelerate the other way. The centre of mass of the whole system stays put.
It's the same physics as a vibration motor with a preferred direction. An unbalanced motor on a surface that has different static and kinetic friction coefficients will slowly walk in one direction. The internal forces are asymmetric in time, and the external friction converts that asymmetry into net displacement.
The offset gyro with pulsed spin produces a clean, tuneable, directional vibration bias. Whether that's useful depends on whether there's an external interaction to exploit — friction, fluid drag, electromagnetic coupling — something that responds differently to the fast pulse than the slow return.
What I Learned
-
The bias is real and scales with pulse strength. Constant spin averages to zero. Pulsed spin produces a persistent non-zero average. The transition is smooth and tuneable.
-
GPU simulation made this visible. The original Euler-integrated matplotlib version showed a hint of this effect but the numbers were too noisy to trust. Running on the GPU with proper numerics and real-time visualisation made the signal unmistakable. Watching the green impulse trail climb steadily while the control case wandered — that's not something a static plot gives you.
-
Conservation laws don't forbid asymmetric internal forces. They forbid net external force from internal interactions. But the distribution of internal force over time can be arbitrarily asymmetric. Pulsing the spin speed is how you break the time symmetry.
-
The interesting question is coupling. A directional vibration bias is only useful if there's something to push against. The mechanism itself is a force amplifier with a preferred direction — it needs a medium or field to interact with to produce net displacement.
-
Real-time visualisation changes how you think about physics. Watching the balls speed up and slow down on the race, seeing the force arrow spend more time pointing one way — that builds intuition in a way that equations and plots don't.
What's Next
The pulsed offset gyro produces a clean directional force bias. The Dzhanibekov rotational valve doesn't help (rotation can't break internal force symmetry). The combination is interesting but doesn't change the fundamental constraint.
The next frontier is coupling. What happens when this mechanism operates in a fluid? When the pulsed vibration interacts with a non-Newtonian medium? When the force asymmetry couples to an electromagnetic field?
The simulation pipeline is ready. The GPU is warm. The physics is asking for a medium to push against.
Two simulations. One control, one experiment. A bias that doesn't go away. Built with Claude Code. Published at indigo-nx.com.
COMMENTS
its all in the pulse ;)